
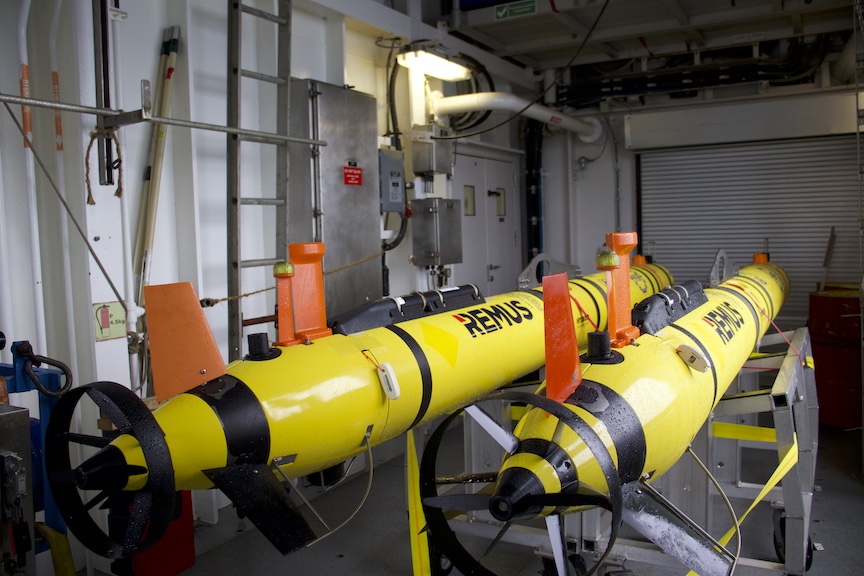
A Remarkable Underwater Robot
Two REMUS 600 autonomous underwater vehicles (AUVs) are components of the Coastal Pioneer Array at its new location in the Mid-Atlantic Bight (MAB). Their mission is to collect data through the water column and in between moorings, serving as an additional data source and validating data collected at the stationary moorings.
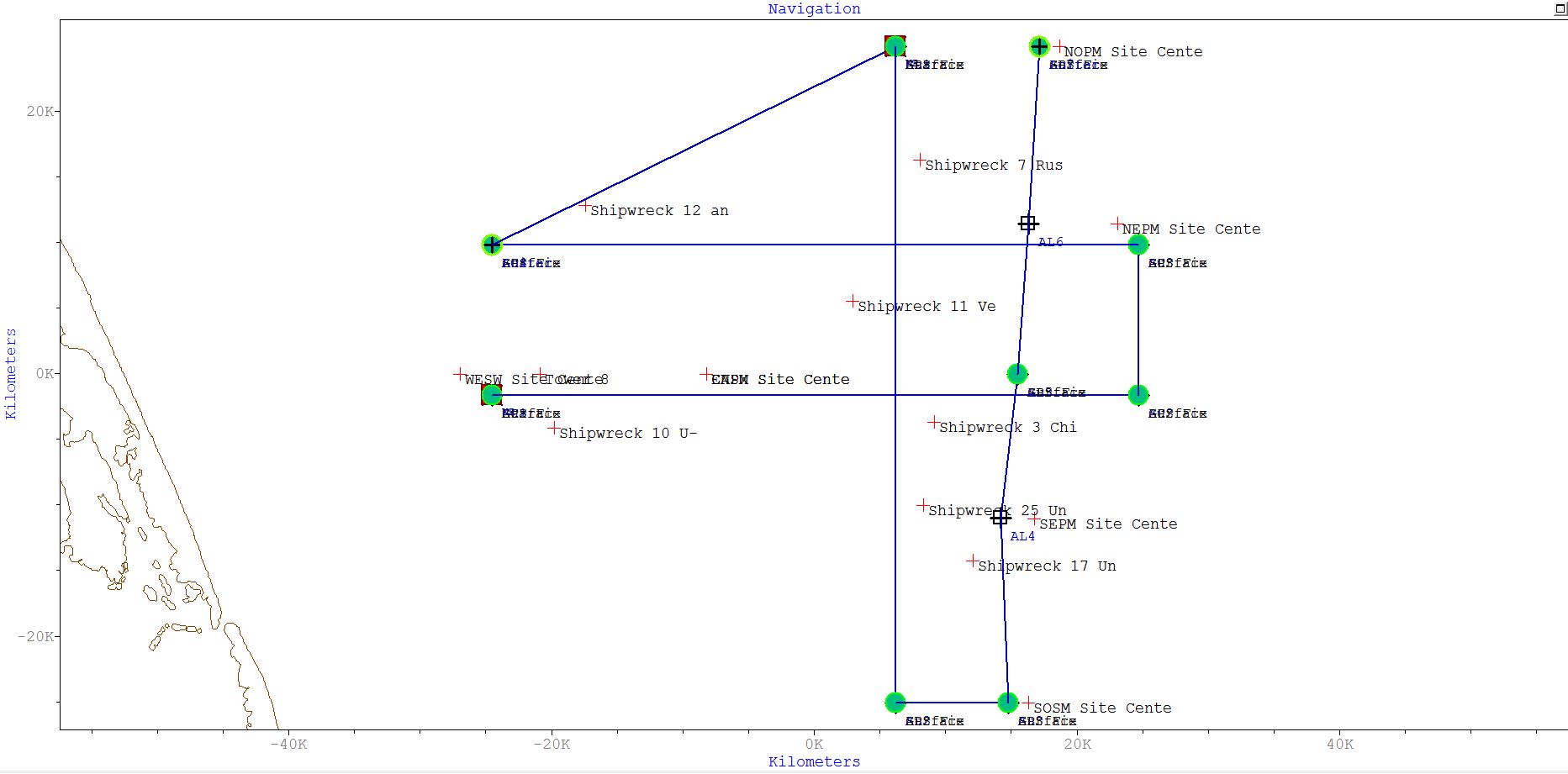
The two AUVs at the Mid-Atlantic site will be collecting data at the site 4-6 times/year. They will travel across the shelf and along the shelf on a prescribed route within the footprint of the moored array.
Prior to being loaded onto the R/V Neil Armstrong for the initial deployment at the MAB site, the OOI Coastal and Global Scale Nodes (CGSN) vehicle team at Woods Hole Oceanographic Institution (WHOI) put them through a rigorous series of checks to make certain they will operate without incident in this new location.
“We run the vehicle through a whole bunch of lab and bench tests, so we are confident that all major systems are working, and it is capable of executing a pre-programmed route when in the water,” explained CGSN Vehicle Lead Diana Wickman.
Once the AUVs passed inspection, they were loaded on the R/V Neil Armstrong to make their way to the MAB. The onboard vehicle team of Wickman and Andy Robinson still had tasks to accomplish before setting them on their journey.
The team mapped a detailed route with waypoints related to the configuration of the Pioneer Array in this new location. These AUVs will survey the array at three knots (as opposed to gliders, which travel at 0.3 knots). This faster AUV speed through the water makes it possible to capture dynamic flows and currents, which is especially important in the more complex area of the MAB. Once programmed, the vehicle team maintains control of the AUV from the ship via a Vehicle Interface Program (VIP)—a specialized program designed to communicate with the deployed AUV. The VIP gives the AUV team the ability to monitor health and performance of the vehicle and change parameters or alter the mission, when and if needed.
An ability to track the AUVs while they are underway is especially important for the way they are used at the Pioneer Array. “Our vehicles’ configuration makes it possible to cover more ground and complete longer surveys than more traditional AUVs could achieve,” said Robinson, CGSN Vehicle Technician. They were designed with efficiency in mind, carrying a streamlined sensor payload rather than the power-hungry sonar or mapping equipment that many REMUS AUVs operate. This allows the vehicles to stay deployed for at least 24 hours, each set to cover 110 km (68 mi) in a typical mission at the MAB.
AUVs are equipped with the same sensors as the four gliders that will be deployed in this new array location. The AUVs will supplement and validate the data being collected by the gliders as well as the moorings. In contrast to the AUVs’ intermittent surveys, gliders will stay onsite and capture data for the six months the array will be in the water. The AUVs’ data collection trips serve to validate the data collected by the gliders as well as providing additional data to promote understanding of conditions in the region.
The AUVs will make their first reports from the MAB this Saturday, April 6, 2024.