MARUM Southern Hydrate Ridge Overview Sonar
The Southern Hydrate Ridge Overview Sonar (SHROS) was developed in 2017 by Dr. Yann Marcon, Professor. Dr. Gerhard Bohrmann, and a team of engineers at the MARUM Center for Marine Environmental Sciences and the Department of Geosciences, University of Bremen, Germany. It was funded by the German Federal Ministry of Education and Research (BMBF) within the scope of the “M³: Monitoring Marine Methane” projects (grants 03F0765A and 03F0854A). The SHROS monitors methane bubble plumes located within its 200 m range covering the entire Southern Hydrate Ridge summit.
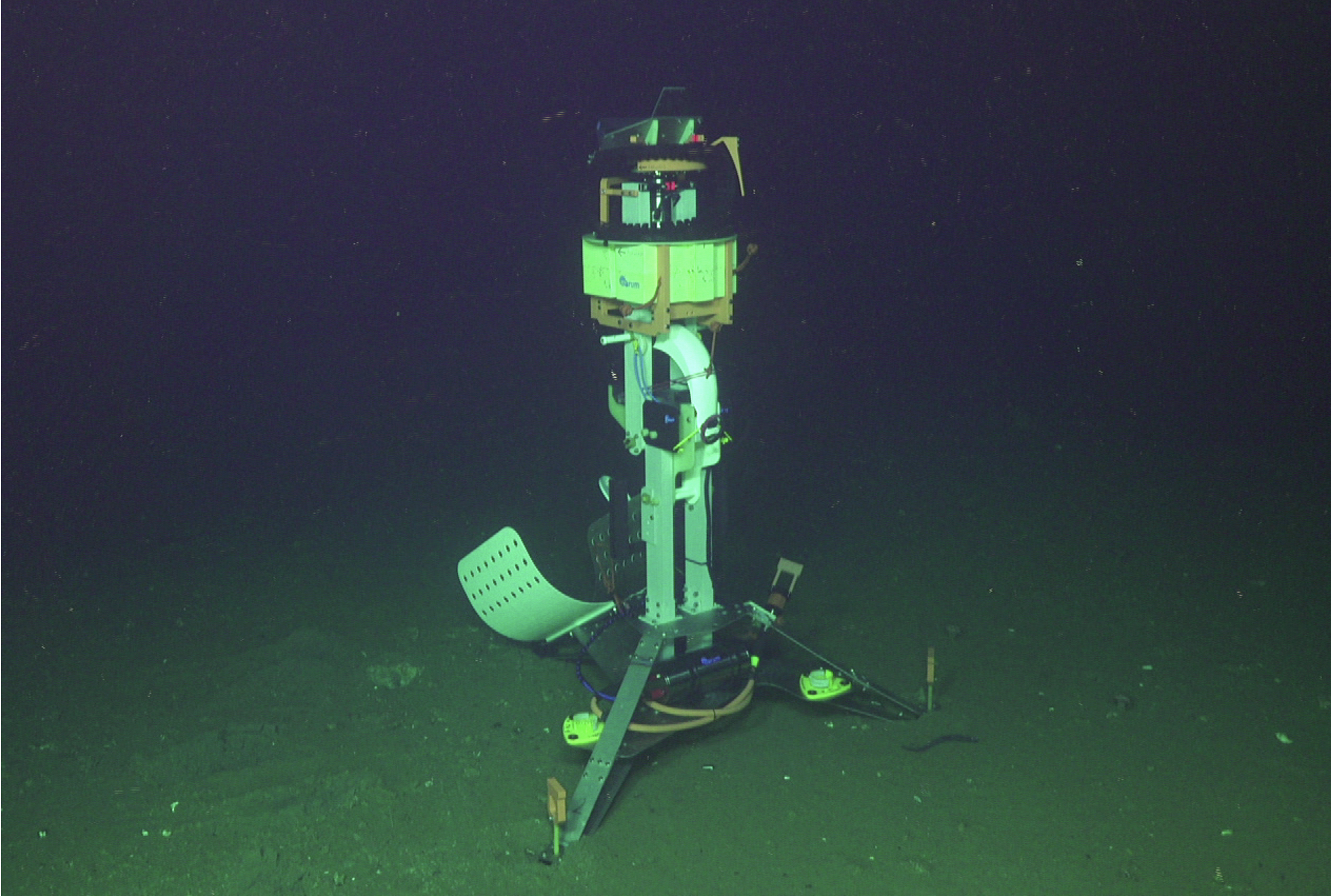
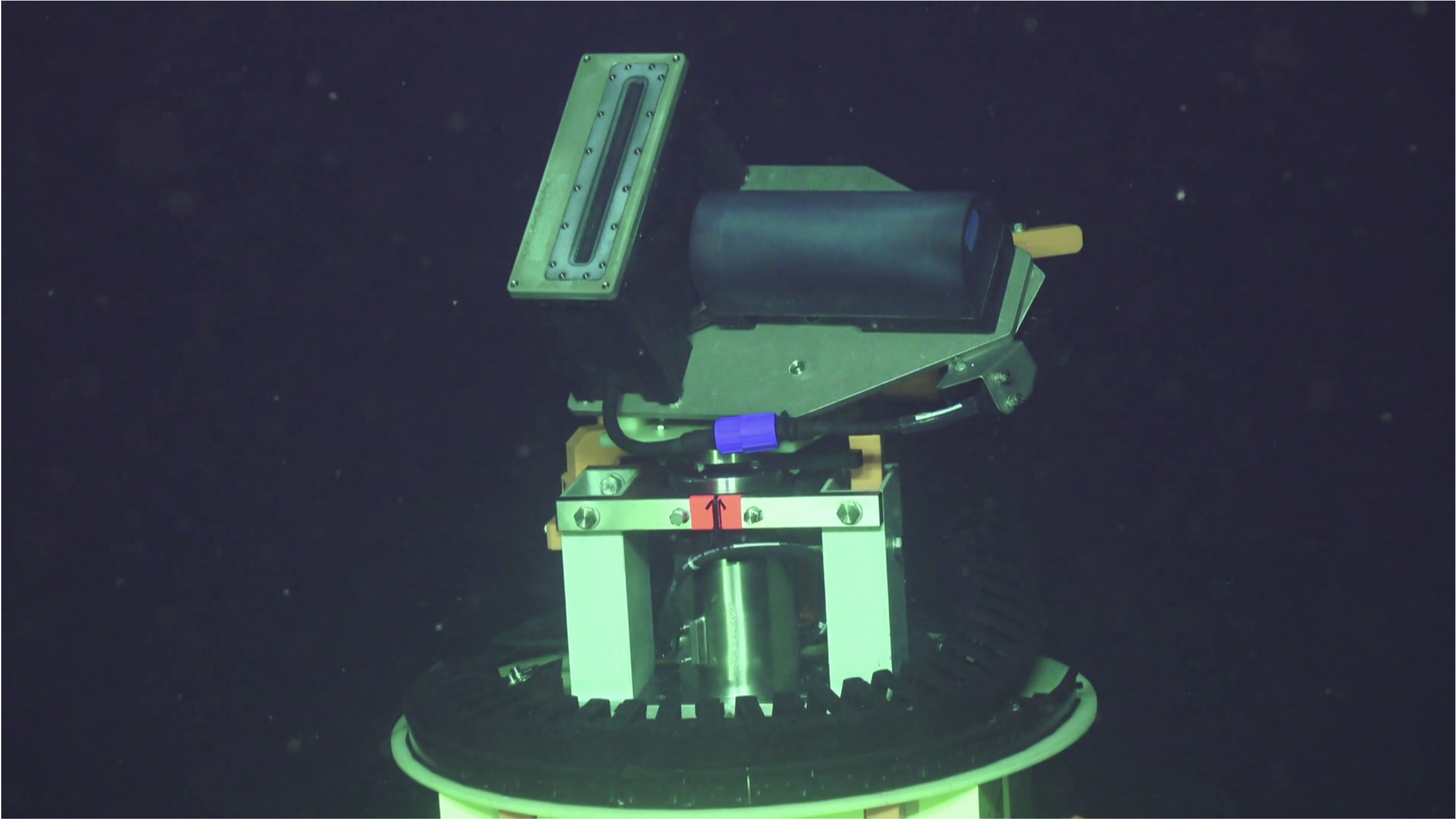
The SHROS consists of a rotating multi-beam echosounder mounted on a 3 m-high tripod (Figure 1). The echosounder is installed on top of a heavy-duty rotator with a rotation range of 360°, and is mounted on its side to orient the swath vertically and with a 45° tilt angle (Figure 2). With this setup, the volume of water that is scanned by a single 360° rotation of the sonar is equivalent to a half-sphere centered on the sonar and with a radius of 200 m. A processing unit located in a pressure vessel near the base of the instrument temporarily records the raw sonar data during the scans (up to 1Gbit/s) to prevent any data loss. The raw data are automatically downloaded at a maximum speed of 100Mbit/s to the NSF funded Regional Cabled Array PI network at the University of Washington after each scan.
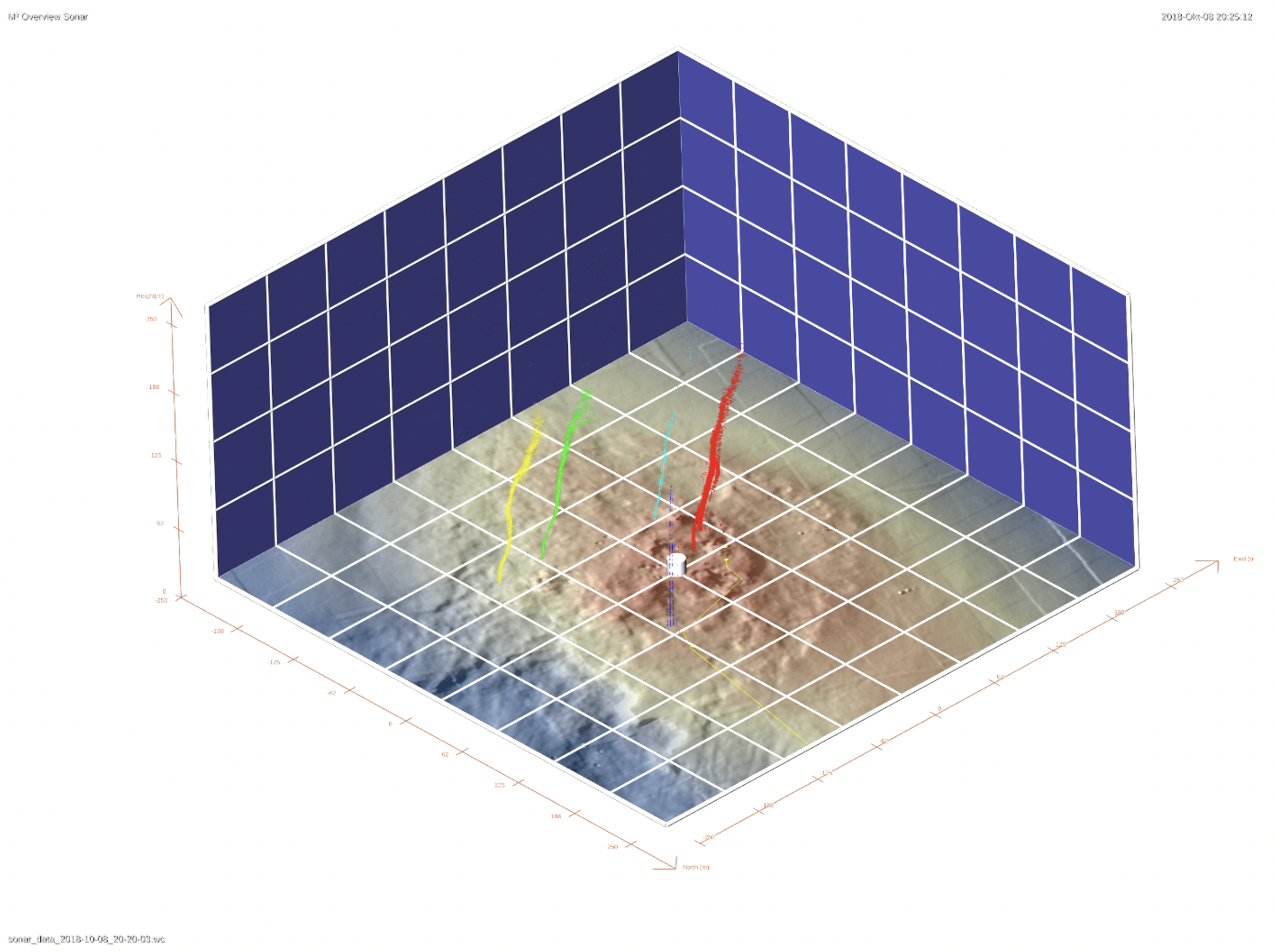
The SHROS is scheduled to conduct one 360° scan of the water column every two hours. Each scan starts facing south (-180°) and rotates clockwise to +180°. During the bi-hourly scans, the sonar pings at a frequency of 350 kHz and a maximum pulse rate of 1 Hz. Depending on the scans, the pulse length settings vary between 70 µs and 560 µs. Depending on the needs, pinging frequencies ranging from 200 kHz to 450 kHz may also be used. The sonar can also ping at 700 kHz with a reduced swath opening.
Access OVRSRA101 DataInstrument Models & Deployed Locations
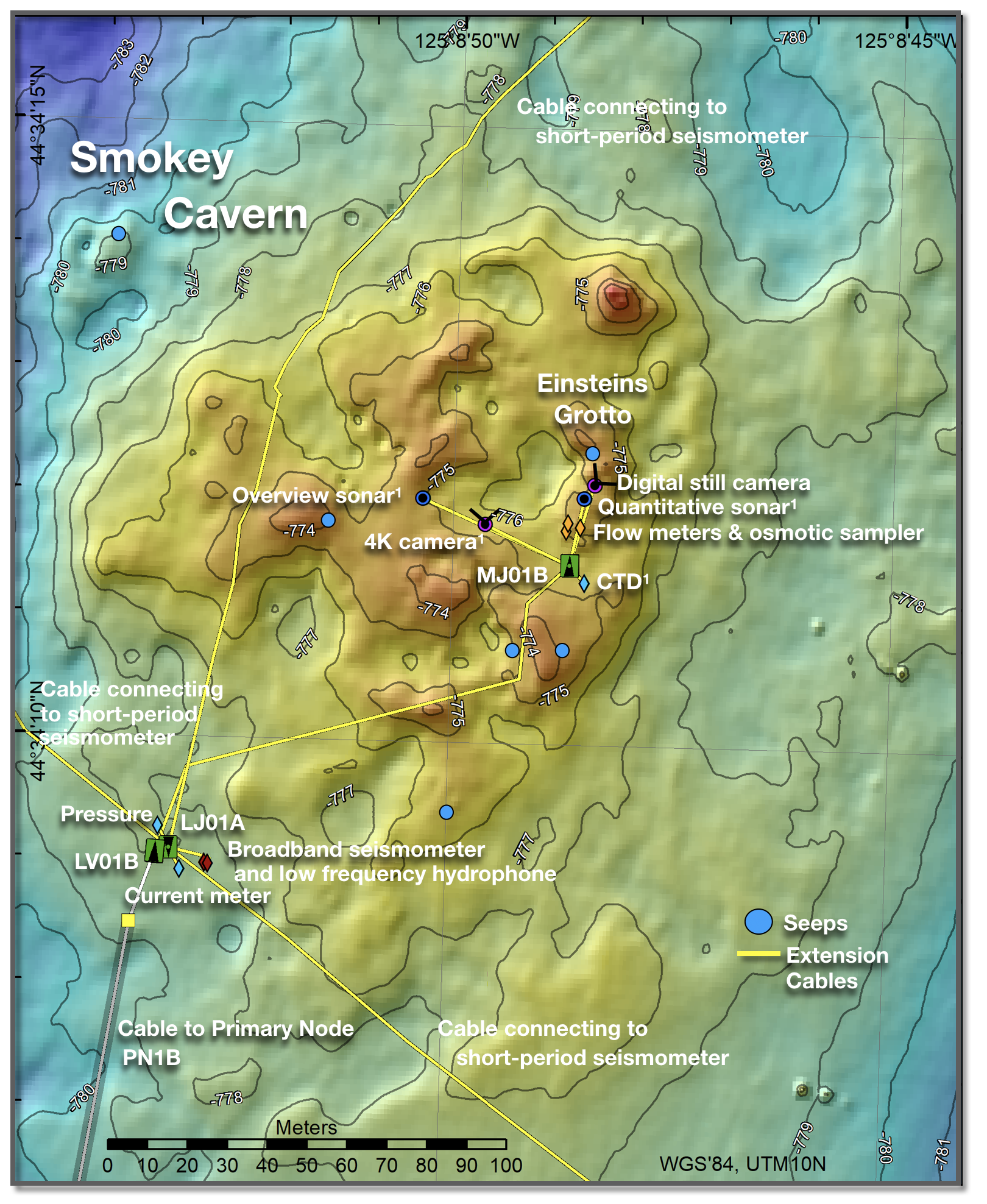
The SHROS was installed near the center of the summit at Southern Hydrate Ridge at a water depth of 780 m. The instrument is connected to the medium- powered junction box MJ01B. It consists of a multibeam sonar (R2Sonic 2022), a heavy-duty titanium rotatoReference Information
Data FormatRaw and processed PI instrument data for the SHROS can be accessed through via the following link http://piweb.ooirsn.uw.edu/marum/data/. Within the accessed ftp site, a read me text file provides information about data formats and instrument dInstrument
OVRSRA101Investigator(s)
Dr. Yann Marcon and Professor Gerhard BohrmannAffiliation(s)
MARUM Center for Marine Environmental Sciences and the Department of Geosciences, University of Bremen, GermanyPrimary Science Discipline
Marine GeophysicsSite
Southern Hydrate Summit 2 Seafloor (RS01SUM2)Node
Medium-Power Junction Box (MJ01B)Depth (m)
780 minimum – 780 maximumAward
M³: Monitoring Marine MethaneFunding Agency
German Federal Ministry of Education and ResearchImages