
Pioneer MAB AUV Mobile Assets (CP16MOAS)
Alongside Coastal Gliders, Coastal Autonomous Underwater Vehicles (AUVs) are a Mobile Asset that surveys the area in and around the array of moorings at the Coastal Pioneer MAB Array
Platform DOI and Citation Guidance
OOI assigns Digital Object Identifiers (DOIs) at the platform or site level. The DOI for the Coastal Pioneer Mid-Atlantic Bight Mobile Asset Autonomous Underwater Vehicles is 10.58046/OOI-CP16MOAS.
The minimum recommended citation for this platform is:
NSF Ocean Observatories Initiative. (2024). Coastal Pioneer Mid-Atlantic Bight Mobile Asset Autonomous Underwater Vehicles, DOI: 10.58046/OOI-CP16MOAS.
This follows the format NSF Ocean Observatories Initiative. (Year Published). Platform Title, DOI: Platform DOI, where Year Published is the year OOI data collection began at the site.
We encourage data users to incorporate full citations when referencing OOI data in order to support FAIR data principles and data traceability. OOI also provides further guidance on citations, including information on adding specific data products and data access points to citations.
Data Access
The following links provide data access via Data Explorer or other methods:
- Direct access to the data on this platform and its subcomponents
- General access to OOI data using a variety of methods
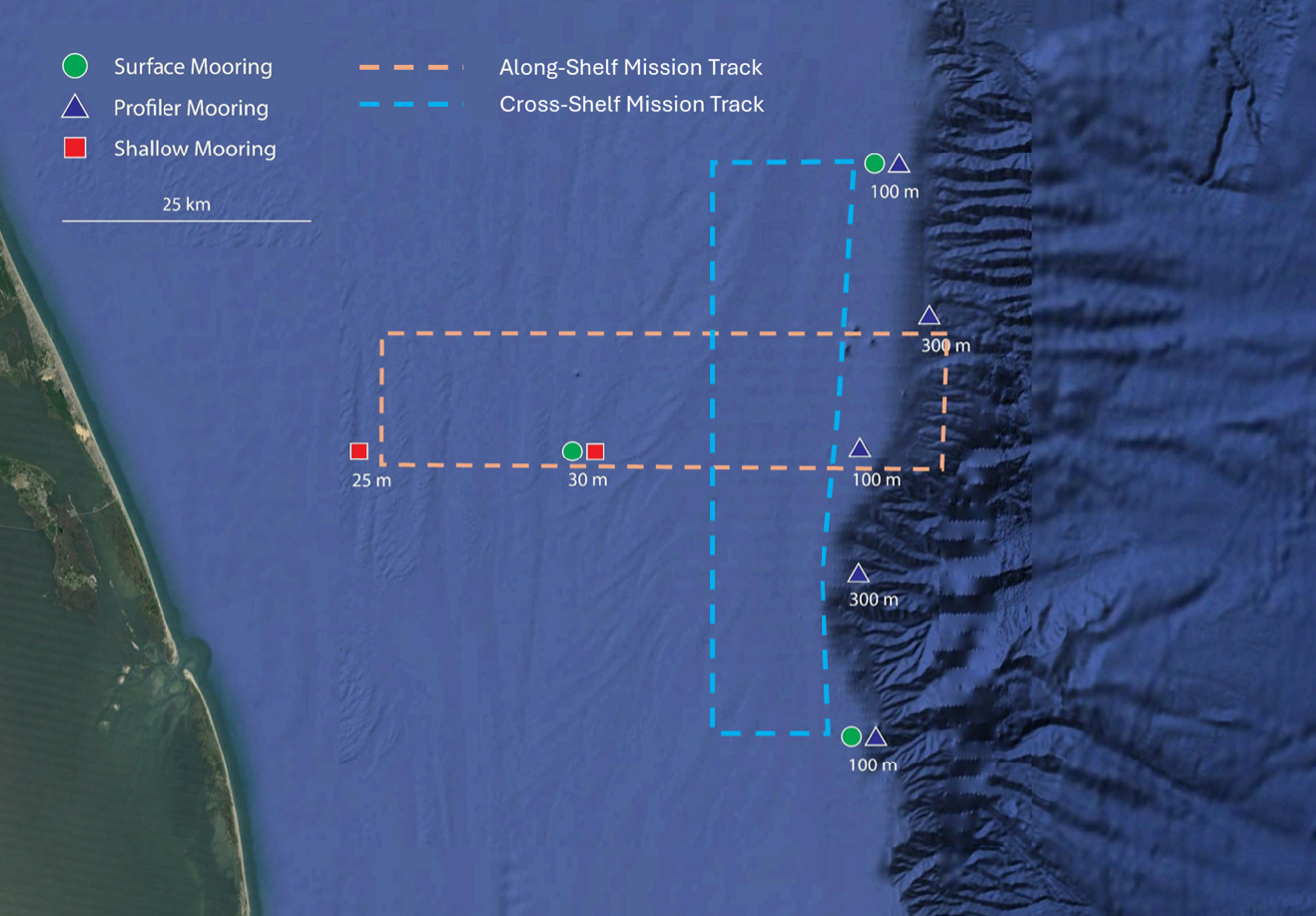
AUV Mission Tracks
- Cross-Shelf, providing synoptic cross-shelf “snapshots” of the frontal zone.
- Along-Shelf, providing synoptic along-shelf “snapshots” of submesoscale structure in the vicinity of the shelfbreak front.
Two Coastal AUVs (HII REMUS-600 AUVs) travel along transects across the shelf-break frontal system extending beyond the mooring array, covering an area approximately 1000 square kilometers in size centered on the array of moorings. The primary role of the AUVs is to resolve cross- and along-front “eddy fluxes” due to frontal instabilities, wind forcing, and mesoscale variability. These AUVs travel along saw-toothed transects, penetrating the sea surface and diving down to a maximum depth of 600 meters.
Deployment Photos

Instruments
This site/platform includes the following instruments. To learn more about an instrument type, select the instrument class-series. To access relevant data streams for an instrument, the instrument code will take you to the OOI Data Portal.
| Instrument Code | Depth | Node | Instrument Class-Series |
Make & Model |
|---|---|---|---|---|
| CP16MOAS-A####-01-FLORTN000 | 0m | AUV | 3-wavelength Fluorometer (FLORTN) | WET Labs - ECO Triplet |
| CP16MOAS-A####-00-ENG000000 | 0m | AUV | Controller (ENG000) | HII - Remus 600 |
| CP16MOAS-A####-03-CTDAVN000 | 0m | AUV | CTD (CTDAVN) | Sea-Bird - SBE Glider Payload (GP-CTD) |
| CP16MOAS-A####-02-DOSTAN000 | 0m | AUV | Dissolved Oxygen (DOSTAN) | Aanderaa - Optode 4330 |
| CP16MOAS-A####-04-NUTNRN000 | 0m | AUV | Nitrate (NUTNRN) | Sea-Bird - Deep SUNA |
| CP16MOAS-A####-06-PARADN000 | 0m | AUV | Photosynthetically Active Radiation (PARADN) | Biospherical Instruments - QSP-2150 |
| CP16MOAS-A####-05-ADCPAN000 | 0m | AUV | Velocity Profiler (ADCPAN) | Teledyne RDI - Workhorse Navigator 600 kHz dual |
Equipment Diagram
Water Depth
30 – 1000 meters
Location
35.95°N, 75.125°W