
Posts Tagged ‘AUVs’
Successful Underwater Surveys in the Mid-Atlantic Bight: OOI Team Deploys REMUS AUVs for Coastal Ocean Monitoring

Taking advantage of a period of calm weather, OOI staff successfully completed underwater surveys of the Pioneer Mid-Atlantic Bight (MAB) shelf and upper slope using OOI REMUS AUVs. With ab underway speed of over 3 knots, the AUVs provide synoptic transects of rapidly changing coastal systems – analogous to repeated “snapshots” of the ocean physical, biological, and nutrient conditions across the shelf capturing changes that occur over short time and spatial scales (meters to kilometers, and hours to one day).
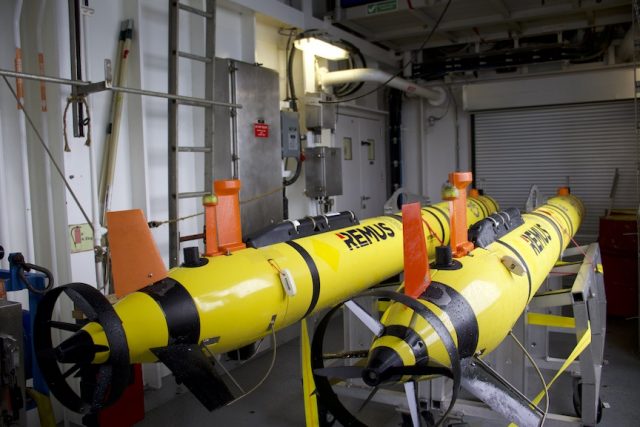
The OOI Pioneer array was relocated from the New England Shelf (NES) to the southern Mid-Atlantic Bight in April 2024. AUV surveys previously conducted in the continental shelf waters offshore of New England now take place offshore of the sandy Outer Banks of North Carolina in a new and highly dynamic part of the US continental shelf. Moving the Pioneer Array to the MAB naturally resulted in some changes to operations, foremost being the use of new vessels (for this cruise, the R/V Virginia operated by the Virginia Institute of Marine Science). For efficiency, the AUVs are shipped fully assembled inside a 20 ft shipping container, along with all communications, control, and deck equipment. On arrival everything can be hoisted aboard and prepared for sea without needing re-integration that consumes valuable days on shore (Fig 1). The ships crane was modified by WHOI engineer Jared Schwartz to install the Ship of Opportunity Launch and Recovery System (SOO-LARS), a modular hydraulic winch system that OOI employs for safe and efficient deployment and recovery of these large AUVs on ships of several classes (Fig. 2).
The AUV operations at MAB derive from previous work at Pioneer NES. Once deployed, the AUVs run autonomously and sample in a series of saw-tooth profiles along a pre-programmed track, remaining in acoustic contact with the support vessel and surfacing periodically to update exact location from GPS. These plans were adapted for the MAB to compensate for the larger expanse of shelf traversed and the large changes in water column density between the shallow (25 m) inner shelf and deeper > 500 m upper slope. This is further complicated by density variations along the shelf and seasonally under the triple-influence of estuarine outflows, continental shelf processes, and the Gulf Stream just a few miles beyond the offshore extent of the sampling region (Fig 3). The MAB is also busy with a range of commercial, fishing, and military vessel traffic, offshore fixed installations, and ocean life in every shape and size imaginable. All factors that must be considered in advance and avoided underway by the invisible submerged AUVs. As was true for Pioneer NES, the support and knowledge of local vessel operators is vital to supporting at-sea operations and for meeting OOI’s science mission objectives.
The AUV data were offloaded from the vehicles after recovery. The data are discoverable in the OOI Data Explorer, and also available on the OOI raw data repository, following data format conversion and sensor post-calibration.
In addition to completing two consecutive surveys, each about 24 hours in length, the at-sea team of Andy Robinson, Collin Dobson, and Natalia Moore completed the scheduled recovery of the Offshore Mesoscale glider cp_379 (Fig. 4). A bonus accomplishment of this cruise was cross-training OOI staff new to AUV operations (Moore), made easier by the prevailing mild weather, experienced AUV techs, and the capable ship’s crew.
[gallery columns="2" size="large" ids="35942,35943,35944,35945"]Photo credits: Collin Dobson
Read MoreA Remarkable Underwater Robot
Two REMUS 600 autonomous underwater vehicles (AUVs) are components of the Coastal Pioneer Array at its new location in the Mid-Atlantic Bight (MAB). Their mission is to collect data through the water column and in between moorings, serving as an additional data source and validating data collected at the stationary moorings.
The two AUVs at the Mid-Atlantic site will be collecting data at the site 4-6 times/year. They will travel across the shelf and along the shelf on a prescribed route within the footprint of the moored array.
[media-caption path="https://oceanobservatories.org/wp-content/uploads/2024/04/MAB_VIP_AUV.jpg" link="#"]The AUV sampling route at the Coastal Pioneer Array in the MId-Atlantic Bight.[/media-caption]Prior to being loaded onto the R/V Neil Armstrong for the initial deployment at the MAB site, the OOI Coastal and Global Scale Nodes (CGSN) vehicle team at Woods Hole Oceanographic Institution (WHOI) put them through a rigorous series of checks to make certain they will operate without incident in this new location.
“We run the vehicle through a whole bunch of lab and bench tests, so we are confident that all major systems are working, and it is capable of executing a pre-programmed route when in the water,” explained CGSN Vehicle Lead Diana Wickman.
Once the AUVs passed inspection, they were loaded on the R/V Neil Armstrong to make their way to the MAB. The onboard vehicle team of Wickman and Andy Robinson still had tasks to accomplish before setting them on their journey.
The team mapped a detailed route with waypoints related to the configuration of the Pioneer Array in this new location. These AUVs will survey the array at three knots (as opposed to gliders, which travel at 0.3 knots). This faster AUV speed through the water makes it possible to capture dynamic flows and currents, which is especially important in the more complex area of the MAB. Once programmed, the vehicle team maintains control of the AUV from the ship via a Vehicle Interface Program (VIP)—a specialized program designed to communicate with the deployed AUV. The VIP gives the AUV team the ability to monitor health and performance of the vehicle and change parameters or alter the mission, when and if needed.
An ability to track the AUVs while they are underway is especially important for the way they are used at the Pioneer Array. “Our vehicles’ configuration makes it possible to cover more ground and complete longer surveys than more traditional AUVs could achieve,” said Robinson, CGSN Vehicle Technician. They were designed with efficiency in mind, carrying a streamlined sensor payload rather than the power-hungry sonar or mapping equipment that many REMUS AUVs operate. This allows the vehicles to stay deployed for at least 24 hours, each set to cover 110 km (68 mi) in a typical mission at the MAB.
[media-caption path="https://oceanobservatories.org/wp-content/uploads/2024/04/IMG_1378-copy.jpg" link="#"]These two AUVs will “fly” through water at the new location of the Coastal Pioneer Array in the MId-Atlantic Bight on April 6, 2024. Credit:DT Crist © WHOI.[/media-caption]AUVs are equipped with the same sensors as the four gliders that will be deployed in this new array location. The AUVs will supplement and validate the data being collected by the gliders as well as the moorings. In contrast to the AUVs’ intermittent surveys, gliders will stay onsite and capture data for the six months the array will be in the water. The AUVs’ data collection trips serve to validate the data collected by the gliders as well as providing additional data to promote understanding of conditions in the region.
The AUVs will make their first reports from the MAB this Saturday, April 6, 2024.
Read More